Reibungskoeffizient: Definition, Formel & Werte (Haft- und Gleitreibung)
Reibungskoeffizient: Definition, Formel & Werte – verständlich erklärt. Unterschiede Haft- und Gleitreibung, typische Werte, Berechnung und Praxisbeispiele kompakt zusammengefasst.
Ein Reibungskoeffizient beschreibt das Verhältnis zwischen der Reibungskraft zweier aneinandergrenzender Oberflächen und der auf sie wirkenden Normalkraft. Er wird häufig in der Physik und im Ingenieurwesen verwendet, wenn man aus der Normalkraft die Reibungskraft abschätzen oder umgekehrt die maximale zulässige Normalkraft abschätzen möchte.
Bildergalerie
3 Bilder

Formel
Für viele praktische Fälle gilt die einfache Beziehung
F f = μ F n {\Darstellungsart F_{f}=\mu F_{n}\,} dargestellt. In dieser Gleichung ist F f {\darstellungsart F_{f}}}
dargestellt. In dieser Gleichung ist F f {\darstellungsart F_{f}}} die Reibungskraft, μ {\darstellungsart \mu }
die Reibungskraft, μ {\darstellungsart \mu } ist der Reibungskoeffizient und F n {\darstellungsart F_{{\n}\,}
ist der Reibungskoeffizient und F n {\darstellungsart F_{{\n}\,} die Normalkraft.
die Normalkraft.
Arten des Reibungskoeffizienten
Der Koeffizient μ {\displaystyle \mu } kann zwei verschiedene Größen bezeichnen:
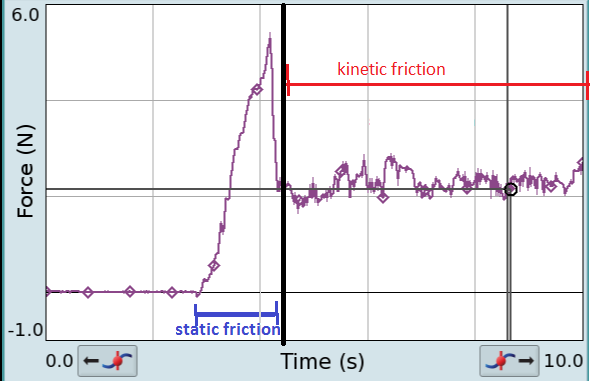
- Haftreibungskoeffizient (μ s {\displaystyle \mu _{s}}
 ) — beschreibt die maximale Reibungskraft, bevor ein unbewegtes Objekt zu rutschen beginnt. Formal gilt meist die Abschätzung F f,max ≤ μ s N.
) — beschreibt die maximale Reibungskraft, bevor ein unbewegtes Objekt zu rutschen beginnt. Formal gilt meist die Abschätzung F f,max ≤ μ s N. - Gleit- bzw. kinetischer Reibungskoeffizient (μ k {\displaystyle \mu _{k}
 ) — beschreibt die konstante Reibungskraft während des Gleits; in vielen Fällen gilt näherungsweise F f = μ k N.
) — beschreibt die konstante Reibungskraft während des Gleits; in vielen Fällen gilt näherungsweise F f = μ k N.
Typischerweise ist μ s ≥ μ k: es braucht eine größere Kraft, um ein ruhendes Objekt in Bewegung zu setzen, als um ein bereits gleitendes Objekt weiterzubewegen.
Eigenschaften
- Dimensionslos: Der Reibungskoeffizient ist dimensionslos und hat keine Einheit.
- Skalar: Er ist ein Skalar — der Wert selbst hat keine Richtung; die wirkende Reibungskraft wirkt jedoch stets entgegengesetzt zur relativen Bewegung oder zur Bewegungsrichtung.
- Abhängigkeit von Oberflächen: μ hängt von Materialpaarung, Rauheit, Temperatur, Feuchte, Oberflächenbeschichtung oder Schmierung ab.
- Kein generelles Limit zwischen 0 und 1: Häufig liegen Werte in diesem Bereich, aber μ kann auch größer als 1 sein — z. B. hat Silikonkautschuk auf rauer Oberfläche oft μ ≫ 1. Ein Wert von 0 würde perfekte Gleit- oder Superfluidität bedeuten (Superfluidität ist ein Spezialfall), in der Praxis gibt es normalerweise Reibung.
- Unabhängigkeit von Kontaktfläche (vereinfachend): In vielen einfachen Modellen ist die Reibungskraft unabhängig von der scheinbaren Kontaktfläche, sondern nur proportional zur Normalkraft. Dies gilt nicht in allen Fällen (z. B. bei klebenden Kontakten, sehr weichen Materialien oder bei Kontaktmechanik auf Mikro-/Nanoskala).
Formeln und Hinweis zur Notation
Oft verwendete Beziehungen sind:
- F_{f}\le \mu_{s}N (maximale statische Reibung)
- F_{f}=\mu_{k}N (kinetische Reibung, während des Gleits)
In der Praxis wird häufig die Formel
F f f = μ N {\darstellungsstil F_{f}=\mu N}  (1)
(1)
verwendet, wobei
F f {\Anzeigestil F_{f}} die Reibungskraft (in Newton),
μ {\displaystyle \mu } der statische (μ s {\displaystyle \mu _{s}}) oder kinetische (μ k {\displaystyle \mu _{k}}) Reibungskoeffizient (dimensionslos) und
N {\Anzeigestil N} die Normalkraft (in Newton) ist.
die Normalkraft (in Newton) ist.
Typische Werte (Richtwerte)
- Stahl auf Stahl (trocken): μ s ≈ 0,6 – 0,8, μ k ≈ 0,4 – 0,6
- Holz auf Holz: μ ≈ 0,2 – 0,5 (abhängig von Holzart und Oberfläche)
- Gummi auf Beton: μ ≈ 0,6 – 1,0 (bei trockenem Zustand können hohe Werte auftreten)
- Teflon (PTFE) auf Stahl: μ ≈ 0,04 – 0,1 (niedrige Reibung)
- Eis auf Eis: μ ≈ 0,01 – 0,1 (stark temperatur- und Schmierstoff-abhängig)
- Gleitlager mit Schmierung: μ kann sehr klein sein (0,001 oder kleiner)
Diese Werte sind nur grobe Orientierungen; genaue Werte müssen für konkrete Material- und Oberflächenzustände experimentell bestimmt werden.
Beispielrechnung
Ein Block mit der Masse m = 10 kg liegt auf einer horizontalen Fläche. Die Normalkraft ist N = m·g ≈ 10 kg · 9,81 m/s² = 98,1 N. Bei einem kinetischen Reibungskoeffizienten μ k = 0,3 gilt
F f = μ k N ≈ 0,3 · 98,1 N ≈ 29,4 N.
Messung
Zur Bestimmung von Reibungskoeffizienten werden z. B. verwendet:
- Schiefe Ebene (Bestimmung des Winkels, bei dem ein Körper zu rutschen beginnt → μ s = tan(θ)),
- Tribometer (kontrollierte Prüfstände für Gleit- und Rollreibungsprüfungen),
- Bremsversuche, Pendel- oder Hängeversuche in Laboren.
Einschränkungen des einfachen Modells
- Das Modell F f = μ N ist eine Näherung und gilt nicht für alle Fälle (z. B. für sehr weiche Materialien, klebende Kontakte, Kontakthysterese, nichtlineare Abhängigkeiten von Relativgeschwindigkeit).
- Oberflächenrauheit, Schmutz, Feuchtigkeit oder Schmierfilm können den Reibungskoeffizienten stark verändern.
- Bei hohen Geschwindigkeiten spielen zusätzliche Effekte wie Hydrodynamik, Temperaturerhöhung oder Materialverformung eine Rolle.
Die Reibungskraft ist somit die Kraft, die eine Oberfläche gegen die Relativbewegung eines Körpers ausübt — sie wirkt stets entgegen der Bewegungsrichtung oder der Richtung, in die die Bewegung zu erfolgen versucht.
Es könnte auch als Reibung bezeichnet werden und wird als(f) dargestellt.
Fragen und Antworten
F: Was ist ein Reibungskoeffizient?
A: Ein Reibungskoeffizient ist ein Wert, der das Verhältnis zwischen zwei Objekten und die normale Reaktion zwischen den beteiligten Objekten angibt. Er wird in der Physik verwendet, um die Normalkraft oder Reibungskraft eines Objekts zu ermitteln, wenn andere Methoden nicht verfügbar sind.
F: Wie wird der Reibungskoeffizient dargestellt?
A: Der Reibungskoeffizient wird durch Ff = μFn dargestellt, wobei Ff die Reibungskraft, μ der Reibungskoeffizient und Fn die Normalkraft ist.
F: Was sind die zwei verschiedenen Arten von Reibungskoeffizienten?
A: Die zwei verschiedenen Arten von Reibungskoeffizienten sind statisch (μs) und dynamisch (μk).
F: Was bedeutet ein Koeffizientenwert von 0?
A: Ein Wert von 0 bedeutet, dass zwischen den Objekten überhaupt keine Reibung besteht, wie z.B. bei Superfluidität.
F: Was bedeutet ein Koeffizientenwert von mehr als 1?
A: Ein Koeffizientenwert größer als 1 bedeutet, dass die Reibungskraft stärker ist als die Normalkraft.
Q: Wie können Sie Reibungskräfte mathematisch ausdrücken?
A: Reibungskräfte können mathematisch als Ff = μN ausgedrückt werden, wobei Ff die Reibungskraft (in Newton) ist, μ entweder der statische oder der kinetische Reibungskoeffizient (dimensionslos) ist und N die Normalkraft (in Newton) ist.
Verwandte Artikel
Autor
AlegsaOnline.com Reibungskoeffizient: Definition, Formel & Werte (Haft- und Gleitreibung) Leandro Alegsa
URL: https://de.alegsaonline.com/art/21385