Koppelnavigation (Dead Reckoning): Definition, Prinzip & Anwendungsgebiete
Koppelnavigation (Dead Reckoning): Definition, Prinzip & Anwendungsgebiete – kompakte Erklärung, Praxisbeispiele und Einsatz bei GPS-Ausfall für See-, Luft- und Landnavigation.
Dead Reckoning (oder DR) ist eine Methode zur Schätzung einer Position. Es ist ein wichtiger Teil der Navigation. Dabei wird vom letzten bekannten Punkt (einem Fix) ausgegangen und mithilfe von Geschwindigkeit, Richtung und vergangener Zeit die aktuelle Position fortgeschrieben. Das Ergebnis ist eine Schätzung der Lage, die zwischen zwei zuverlässigen Positionsbestimmungen verwendet oder als Übergangslösung genutzt wird.
Bildergalerie
3 Bilder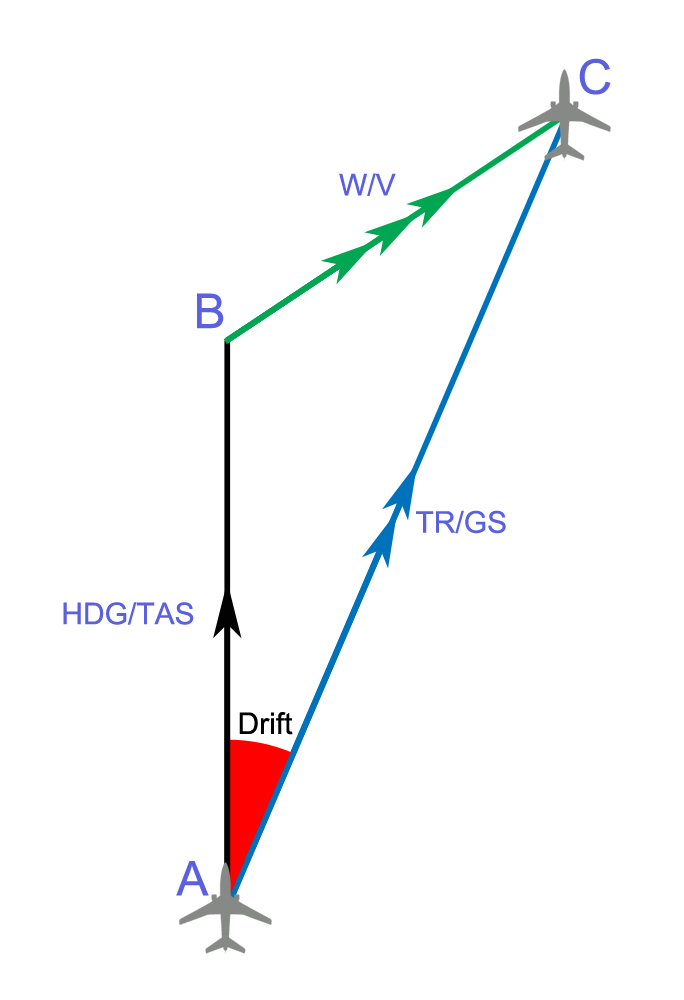


Grundprinzip
Das Grundprinzip der Koppelnavigation ist einfach:
- Bekannter Startpunkt: ein zuletzt bestimmter Fix (z. B. durch Landbeobachtung, Funkpeilung oder GPS).
- Bewegungsdaten: Geschwindigkeit (über Grund oder durchs Wasser), Kurs/Heading und verstrichene Zeit seit dem Fix.
- Fortschreibung: Aus Geschwindigkeit × Zeit wird die zurückgelegte Strecke errechnet und entlang des Kurses auf den Fix aufgetragen, wodurch die geschätzte Position entsteht.
Verfahren und Hilfsmittel
Historisch geschah die Koppelnavigation mit Logline, Kompass und Chronometer. Heute werden zusätzlich technische Sensoren eingesetzt:
- Inertiale Messeinheiten (IMU) und Kreisel (Gyroskope) für Lage und Beschleunigung.
- Geschwindigkeitsmesser (z. B. Pitotrohr, Doppler-Sensor, Rad- oder Raddrehzahlsensoren bei Fahrzeugen).
- Kalman-Filter und andere Algorithmen zur Sensorfusion, um Messfehler zu glätten.
Fehlerquellen und Eigenschaften
Wichtig ist, dass Fehler bei der Koppelnavigation kumulieren. Kleine Ungenauigkeiten in Kurs, Geschwindigkeit oder Zeit führen mit zunehmender Dauer zu immer größeren Abweichungen (Drift). Typische Ursachen sind:
- Messfehler der Sensoren (Ungenauigkeit oder Bias von Gyroskopen und Beschleunigungssensoren).
- Fehler bei der Geschwindigkeitsbestimmung (Strömung bei Schiffen, Wind bei Flugzeugen, Schlupf bei Fahrzeugrädern).
- Fehler beim Kurs (Magnetkompassabweichungen, Fehlkalibrierung).
Deshalb benötigt Dead Reckoning periodische Korrekturen durch zuverlässige Positionsbestimmungen (z. B. GPS-Fixes, Sichtbeobachtungen oder Kartenabgleich).
Gegenmaßnahmen zur Reduktion von Fehlern
- Sensorfusion: Kombination von IMU, GPS, Odometrie und anderen Quellen mit statistischen Filtern (z. B. Kalman-Filter).
- Map-Matching: Abgleich mit Karteninformationen, um Positionen auf bekannte Straßen oder Fahrspuren zu korrigieren.
- Regelmäßige Fixes: Wiederholte Positionsbestimmungen (GPS, Funksignale, Landmarken) zur Reset-Möglichkeit.
- Kalibrierung und Fehlerkompensation: Kompasskalibrierung, Bias-Schätzung bei IMUs und Temperaturkompensation.
Anwendungsgebiete
Koppelnavigation wird in vielen Bereichen eingesetzt, insbesondere dort, wo eine kontinuierliche Positionsbestimmung nötig ist oder GPS nicht permanent verfügbar ist:
- Seefahrt: Traditionell zum Überqueren großer Ozeane, weiterhin als Backup bei Ausfall von Satellitensystemen.
- Luftfahrt: Kurzzeitige Navigation, etwa wenn GNSS-Signale gestört sind oder während Start- und Landephasen.
- Landfahrzeuge: Ergänzung zur GPS-Navigation in Tunneln oder engen Straßenschluchten; in autonomen Fahrzeugen oft Teil der Lokalisierung.
- Roboter und Drohnen: Odometrie und IMU-basierte Dead Reckoning zur Positionsschätzung zwischen Sensor- oder Sicht-Updates.
- Mobile Anwendungen und Netzwerke: Bei Ortung in Gebäuden oder Indoor-Navigation, wenn Satellitensignale fehlen.
- Militärische und sicherheitskritische Systeme: Redundante Navigation für den Fall von Störungen oder Ausfällen externer Systeme.
Historische Bedeutung
Dead Reckoning spielte eine zentrale Rolle in der frühen Navigation. Seeleute nutzten Kurs, Geschwindigkeit und Zeit, um ihre Position auf See zu berechnen, nachdem Christoph Kolumbus in die Neue Welt gekommen war. Die Bestimmung des Breitengrads war durch astronomische Beobachtung möglich, doch die exakte Bestimmung der Länge war lange Zeit nur eingeschränkt möglich, weil präzise Uhren fehlten (Längengradproblem). Deshalb war die Koppelnavigation über lange Strecken oft die einzige verfügbare Methode. Auch Entdecker wie Richard Byrd nutzten dieses Verfahren: 1926 flog Byrd als einer der ersten Menschen zum Nordpol und konnte dank systematischer Fortrechnungen und Orientierung an Eisfeldern zur Startposition zurückkehren.
Moderne Relevanz
Obwohl heute das Global Positioning System und andere GNSS-Verfahren weit verbreitet sind, bleibt Dead Reckoning relevant:
- Als Backup, wenn Satellitensignale gestört oder blockiert sind (z. B. in Häfen, Häuserschluchten, Tunneln oder bei Weltraumwetter-Einflüssen).
- Zur Glättung und Interpolation zwischen GNSS-Fixes, besonders bei hoher Dynamik.
- In Anwendungen mit eingeschränktem Empfang (Indoor-Navigation, Unterwasserfahrzeuge), wo GNSS nicht nutzbar ist.
- In der Forschung und Lehre: Piloten, Navigatoren und Seeleute lernen Koppelnavigation als grundlegende Fertigkeit für den Notfall.
Praktische Hinweise
- Nutzen Sie Dead Reckoning nicht als alleinige Langzeitlösung — planen Sie regelmäßige Korrekturen ein.
- Kalibrieren Sie Sensoren vor längeren Einsätzen und führen Sie regelmäßige Checks durch.
- Verwenden Sie Sensorfusion und Filterverfahren, um Messfehler zu minimieren.
- Dokumentieren Sie Annahmen (z. B. konstante Strömung oderWind) und prüfen Sie diese regelmäßig gegen Beobachtungen.
Zusammenfassend ist Koppelnavigation eine robuste, historische und weiterhin nützliche Technik zur Positionsschätzung. Sie ist einfach im Prinzip, erfordert aber sorgfältige Fehlerbehandlung und regelmäßige Korrekturen, um praktikable Genauigkeiten zu erhalten.

Methode
Das Totenkalkül beginnt von einem bekannten Punkt (dem Fix) aus. Dann muss die Geschwindigkeit des Fahrzeugs bekannt sein. In alten Zeiten warfen Schiffe einen Baumstamm über die Seite (an ein Seil gebunden) und zählten, wie lange es dauerte, um diesen Stamm zu passieren (oder ein Seil mit Knoten zu ziehen und zu zählen, wie viele Knoten in einer bestimmten Zeit herausgezogen werden). Daraus ergäbe sich die Geschwindigkeit des Schiffes. Die Kenntnis der Richtung durch einen Kompass würde die Richtung angeben. Aus diesen beiden Zahlen könnte eine Schätzung (eine gute Schätzung) über den aktuellen Standort des Fahrzeugs gemacht werden. Allerdings schiebt ein Wind das Fahrzeug zu einer Seite (Drift genannt), so dass auch dies gemessen werden muss. Es gibt auch Strömungen im Wasser, sogar mitten im Ozean. Im Laufe der Zeit könnte auch dies zu Fehlern führen, daher wurden Karten erstellt, um die Strömungen zu korrigieren.
Flugzeuge können ihre Windgeschwindigkeit leicht messen (wie schnell sie durch die Luft fliegen), aber nicht, wie schnell sie sich über das Land bewegen (die so genannte Bodengeschwindigkeit). Ein Gegen-, Rücken- oder Seitenwind verändert die Geschwindigkeit über Grund. Wenn die Höhe des Flugzeugs bekannt ist, kann die Bodengeschwindigkeit ermittelt werden, indem man zeitlich bestimmt, wie schnell das Flugzeug an einem Objekt auf dem Boden vorbeifliegt. (Je höher Sie sich befinden, desto langsamer scheint sich der Boden zu bewegen). Ein Fenster auf dem Boden des Flugzeugs kann verwendet werden, um die Geschwindigkeit über Grund und die Drift des Flugzeugs zu ermitteln.
Ein Fahrzeug am Boden kann auch die Koppelnavigation verwenden. Normalerweise brauchen sie sich keine Sorgen über die Abdrift durch den Wind zu machen, und an Land gibt es keine Strömungen, so dass diese Koppelnavigation einfacher ist.
Fragen und Antworten
F: Was ist Dead Reckoning?
A: Dead Reckoning (oder DR) ist eine Methode zur Schätzung einer Position anhand des letzten bekannten Punktes, der Geschwindigkeit und der Richtung der Bewegung.
F: Wofür wird Dead Reckoning verwendet?
A: Dead Reckoning wird verwendet, um die Position eines Schiffes, Flugzeugs oder Fahrzeugs zu bestimmen.
F: Warum wird Dead Reckoning heute nicht mehr so häufig verwendet?
A: Das Global Positioning System (GPS) wird heute für die Navigation verwendet, so dass Dead Reckoning weniger wichtig ist.
F: In welchen Situationen ist Dead Reckoning noch nützlich?
A: Dead Reckoning ist in Gebieten nützlich, in denen kein GPS verfügbar ist, oder für kurze Zeiträume, wenn ein GPS-Update verpasst wurde.
F: Warum ist es wichtig, über Dead Reckoning Bescheid zu wissen?
A: Das Wissen über Dead Reckoning ist wichtig für den Fall, dass die GPS-Satelliten beschädigt werden oder die Ausrüstung verloren geht, damit Segler und Piloten weiterhin navigieren können.
F: Wie haben die Seeleute die Welt kartografiert, nachdem Christoph Kolumbus in die Neue Welt kam?
A: Die Seeleute nutzten die Koppelnavigation und die Sterne, um ihren Breitengrad zu bestimmen und die Welt zu kartieren.
F: Wie wurde Richard Byrd der erste Mensch, der zum Nordpol flog?
A: Richard Byrd nutzte Dead Reckoning, um 1926 zum Nordpol zu fliegen. Er flog 16 Stunden lang und kehrte an den Ort zurück, den er verlassen hatte, nur mit Eisfeldern unter sich.
Verwandte Artikel
Autor
AlegsaOnline.com Koppelnavigation (Dead Reckoning): Definition, Prinzip & Anwendungsgebiete Leandro Alegsa
URL: https://de.alegsaonline.com/art/25956
Quellen
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"