Instruktions-Pipelining bei Prozessoren: Prinzip, Aufbau und Bedeutung
Übersicht zum Instruktions‑Pipelining in Prozessoren: Funktionsprinzip, typische Stufen, Vor‑ und Nachteile, historische Entwicklung, Varianten und praktische Anwendungen.
Instruktions‑Pipelining ist eine grundlegende Technik in der Mikroarchitektur moderner Prozessoren, Mikrocontroller und CPUs, die darauf abzielt, den Instruktionsdurchsatz deutlich zu erhöhen. Anstatt jede Maschinenanweisung vollständig nacheinander zu bearbeiten, wird die Verarbeitung in mehrere aufeinanderfolgende Teilschritte zerlegt. Dadurch können verschiedene Befehle gleichzeitig in unterschiedlichen Stufen der Verarbeitung verteilt sein. Diese Grundidee wird in Fachtexten oft mit einer Fließband‑ oder Rohrleitungs‑Analogie erklärt: Jede Stufe transportiert einen Teil der Arbeit weiter, bis die Instruktion vollständig ausgeführt ist. Für weiterführende technische Beschreibungen siehe Instruction Pipelining und allgemeine Architekturüberblicke unter Architektur‑Einführung.
Bildergalerie
1 Bild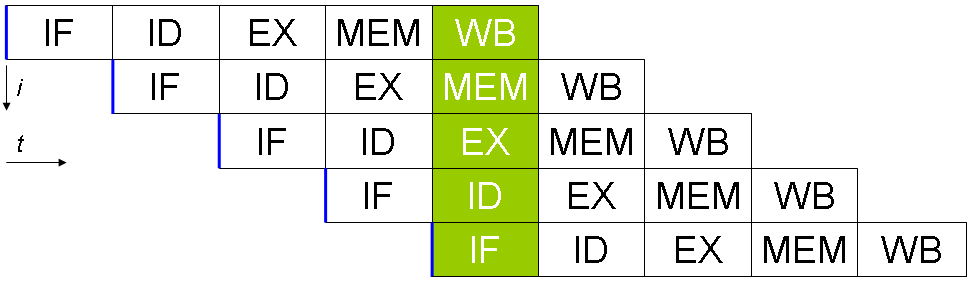
Grundprinzip und typische Stufen
Die Aufteilung einer Instruktion in mehrere Mikrooperationen erlaubt es, die Logik zwischen den Stufen mit Speicherelementen zu trennen, meist Flip‑Flops oder Register, die mit dem Takt synchronisiert werden. Wenn jede Stufe innerhalb einer Taktperiode ihre Aufgabe erledigt, kann die Pipeline in jedem Takt eine neue Instruktion aufnehmen, sofern keine Verzögerungen auftreten. Ein verbreitetes Modell in RISC‑Prozessoren umfasst fünf grundlegende Stufen, die auch in vielen Lehrbüchern als Beispiel dienen:
- Fetch – Anweisung aus dem Instruktionsspeicher holen
- Decode / Register‑Read – Befehlsdekodierung und Lesen von Operanden aus Registern
- Execute – ALU‑Operationen, Adressberechnung oder Sprungauswertung
- Memory – Zugriff auf Daten‑Cache oder Speicher
- Writeback – Ergebnisse zurück in Register schreiben
Die Trennung in Stufen reduziert die kritische Pfadlänge der Logik zwischen zwei Speicherzellen und erlaubt damit höhere Taktfrequenzen. Technische Details zu Mikrooperationen und deren Einfluss auf die Pipeline‑Organisation werden unter CPU‑Befehlen und Mikrocode diskutiert.
Historische Entwicklung und Designüberlegungen
Das Konzept des Pipelining entwickelte sich parallel zur Möglichkeit, steigende Taktraten und integrierte Speicher in Prozessoren zu realisieren. Frühe Rechner nutzten einfache Formen der Parallelisierung; mit wachsender Komplexität der Instruktionssätze und größeren Integrationsdichten wurden ausgefeiltere Pipeline‑Techniken nötig. Moderne Implementierungen verbinden Pipelining mit weiteren Techniken wie Out‑of‑Order‑Ausführung, Register‑Renaming und Superskalarität. Die Praxis zeigt, dass einfache Pipelinen anhand von Flip‑Flops und synchroner Taktung stabiler zu implementieren sind, wie in Lehrbeispielen zur Takt‑logik zu finden ist (Flip‑Flops). Ergänzende Materialien zur historischen Entwicklung und Architekturvergleichen sind unter Mikrocontroller‑Design und CPU‑Architekturen abrufbar.
Vorteile, typische Probleme und Gegenmaßnahmen
Pipelining erhöht primär den Durchsatz: Während eine nicht‑pipelined CPU oft in vielen Teilen des Zyklus Leerlauf hat, arbeiten bei einer Pipeline mehrere Module gleichzeitig am Fortschritt unterschiedlicher Instruktionen. Allerdings führt die Parallelverarbeitung zu neuen Problemen, den sogenannten Hazards:
- Daten‑Hazards: wenn nachfolgende Instruktionen Daten benötigen, die noch nicht geschrieben wurden
- Steuer‑(Control)‑Hazards: durch Sprung‑ oder Verzweigungsinstruktionen, bei denen der nächste Fetch‑Zyklus nicht eindeutig ist
- Strukturelle Hazards: Ressourcenkonflikte, wenn mehrere Stufen dieselbe Hardware benötigen
Gängige Gegenmaßnahmen sind Forwarding/Bypassing, Pipeline‑Stalls (Einfügen von NOPs), branch prediction zur Reduktion von Verzögerungen bei Sprüngen sowie komplexe Mechanismen wie speculative execution. Informationen zu typischen Optimierungen finden sich in technischen Übersichten (Mikrooperationen) und Implementationsleitfäden (Analogie und Design). Bei inkorrekter Behandlung müssen Pipelines teilweise geleert bzw. neu gefüllt werden, ein Vorgang, der als Flush bezeichnet wird.
Varianten und praktische Anwendungen
Pipelining ist kein einheitliches Konzept, sondern zeigt unterschiedliche Ausprägungen: von einfachen, statisch gepipelinten RISC‑Kernen über tief gepipelinte Hochfrequenz‑Designs bis hin zu superskalaren und out‑of‑order‑fähigen Cores, die mehrere Instruktionen je Takt verarbeiten können. Mikrocontroller nutzen oft kürzere, weniger komplizierte Pipelines, um Energie und Fläche zu sparen, während High‑End‑CPUs tiefere Pipelines, umfangreiche Prädiktoren und komplexe Scoreboarding‑Mechanismen einsetzen. Beispiele für typische Einsatzgebiete sind eingebettete Systeme, Desktop‑ und Server‑CPUs sowie spezialisierte Signalprozessoren. Weiterführende technische Referenzen und Implementationsbeispiele sind unter impl. Hinweise und Architekturressourcen zu finden.
Eine Pipeline gilt als „vollständig gepipelt“, wenn sie in jedem Takt eine neue Instruktion aufnehmen kann, ohne dass Wartezyklen nötig sind. In der Praxis ist dieses Ideal oft durch Hazards und Ressourcenbegrenzungen eingeschränkt; durch sorgfältiges Mikroarchitektur‑Design lassen sich aber viele der Effekte abmildern. Für weitergehende technische Übungen, Fallstudien und Simulationen empfiehlt sich die Vertiefung durch Laboraufgaben und akademische Literatur, z. B. zu Instruktionssätzen, Mikrocode‑Umsetzung und Timing‑Analyse unter Instruction Pipelining und ergänzender Lektüre Mikrocontroller‑Praxis.

Vor- und Nachteile des Pipelining
Vorteile des Pipelining:
- Die Zykluszeit des Prozessors wird reduziert; der Befehlsdurchsatz wird erhöht. Pipelining verringert nicht die Zeit, die für die Fertigstellung eines Befehls benötigt wird; stattdessen erhöht es die Anzahl der Befehle, die gleichzeitig ("auf einmal") verarbeitet werden können, und verringert die Verzögerung zwischen abgeschlossenen Befehlen (als "Durchsatz" bezeichnet).
Je mehr Pipelinestufen ein Prozessor hat, desto mehr Instruktionen kann er "auf einmal" verarbeiten und desto geringer ist die Verzögerung zwischen den abgeschlossenen Instruktionen. Jeder vorherrschende Allzweck-Mikroprozessor, der heute hergestellt wird, verwendet mindestens 2 Pipeline-Stufen bis zu 30 oder 40 Stufen. - Wenn Pipelining verwendet wird, kann die CPU-Arithmetik-Logik-Einheit schneller entworfen werden, wird aber komplexer sein.
- Pipelining erhöht theoretisch die Leistung gegenüber einem nicht gepipelineten Kern um einen Faktor der Anzahl der Stufen (unter der Annahme, dass die Taktfrequenz ebenfalls um denselben Faktor ansteigt), und der Code ist ideal für die Pipelineausführung.
- Pipeline-CPUs arbeiten in der Regel mit einer höheren Taktfrequenz als die RAM-Taktfrequenz (ab 2008 arbeiten RAMs im Vergleich zu CPUs mit einer niedrigeren Frequenz), wodurch die Gesamtleistung der Computer erhöht wird.
Nachteile des Pipelining:
Pipelining hat viele Nachteile, obwohl es eine Menge von Techniken gibt, die von CPUs und Compiler-Designern verwendet werden, um die meisten davon zu überwinden; im Folgenden finden Sie eine Liste der üblichen Nachteile:
- Das Design eines Non-Pipeline-Prozessors ist einfacher und billiger in der Herstellung, ein Non-Pipeline-Prozessor führt immer nur einen einzigen Befehl auf einmal aus. Dadurch werden Verzögerungen bei der Verzweigung (beim Pipelining wird jede Verzweigung verzögert) sowie Probleme bei der gleichzeitigen Ausführung von seriellen Befehlen vermieden.
- Bei einem Pipeline-Prozessor erhöht das Einfügen von Flip-Flops zwischen Modulen die Befehlslatenz im Vergleich zu einem Nichtpipeline-Prozessor.
- Ein Prozessor ohne Pipeline hat einen definierten Befehlsdurchsatz. Die Leistung eines Pipeline-Prozessors ist viel schwieriger vorherzusagen und kann für verschiedene Programme stark variieren.
- Viele Entwürfe umfassen Pipelines mit einer Länge von 7, 10, 20, 31 und noch mehr Stufen; ein Nachteil einer langen Pipeline ist, dass bei einer Programmverzweigung die gesamte Pipeline gespült (geräumt) werden muss. Der höhere Durchsatz von Pipelines ist zu gering, wenn der ausgeführte Code viele Verzweigungen enthält: Der Prozessor kann nicht im Voraus wissen, wo die nächste Anweisung zu lesen ist, und muss auf das Ende der Verzweigungsanweisung warten, so dass die dahinter liegende Pipeline leer bleibt. Dieser Nachteil kann verringert werden, indem vorhergesagt wird, ob die Verzweigungsinstruktion einer bedingten Verzweigung auf der Grundlage der vorherigen Aktivität verzweigt wird. Nachdem die Verzweigung aufgelöst ist, muss die nächste Anweisung den ganzen Weg durch die Pipeline zurücklegen, bevor ihr Ergebnis verfügbar wird und der Prozessor wieder "weiterarbeitet". In solchen extremen Fällen könnte die Leistung eines Prozessors mit Pipeline schlechter sein als die eines Prozessors ohne Pipeline.
- Leider sind nicht alle Anweisungen unabhängig. In einer einfachen Pipeline kann die Fertigstellung einer Anweisung 5 Schritte erfordern. Um mit voller Leistung zu arbeiten, muss diese Pipeline 4 aufeinanderfolgende unabhängige Anweisungen ausführen, während die erste abgeschlossen wird. Jede dieser 4 Instruktionen könnte von der Ausgabe der ersten Instruktion abhängen, was dazu führt, dass die Pipeline-Steuerlogik wartet und einen Stillstand oder einen vergeudeten Taktzyklus in die Pipeline einfügt, bis die Abhängigkeit aufgelöst ist. Glücklicherweise können Techniken wie die Weiterleitung die Fälle, in denen eine Blockierung erforderlich ist, erheblich reduzieren.
- Selbstmodifizierende Programme können auf einer Pipeline-Architektur möglicherweise nicht ordnungsgemäß ausgeführt werden, wenn die zu modifizierenden Befehle in der Nähe der auszuführenden Befehle liegen. Dies kann dadurch verursacht werden, dass sich die Befehle bereits in der Prefetch-Eingabewarteschlange befinden, so dass die Änderung möglicherweise nicht für die bevorstehende Ausführung von Befehlen wirksam wird. Befehls-Caches machen das Problem noch schlimmer.
- Gefährdungen: Wenn ein Programmierer (oder Compiler) Assemblercode schreibt, geht er im Allgemeinen davon aus, dass jeder Befehl ausgeführt wird, bevor der nächste Befehl ausgeführt wird. Wenn diese Annahme nicht durch Pipelining bestätigt wird, führt dies dazu, dass sich ein Programm falsch verhält, und die Situation wird als Hazard bezeichnet. Es gibt
verschiedene Techniken zur Lösung von Gefahren oder zur Umgehung von Gefahren, wie z.B. Weiterleiten und Verzögern (durch Einfügen eines Blockierens oder eines verschwendeten Taktzyklus).
Beispiele
Generische Pipeline
Auf der rechten Seite ist eine generische Pipeline mit vier Stufen zu sehen:
- Holen Sie
- entschlüsseln
- Ausführen
- Zurückschreiben
Der obere graue Kasten ist die Liste der Instruktionen, die darauf warten, ausgeführt zu werden; der untere graue Kasten ist die Liste der Instruktionen, die bereits ausgeführt wurden; und der mittlere weiße Kasten ist die Pipeline.
Die Ausführung ist wie folgt:
| Zeit | Ausführung |
| 0 | Vier Befehle warten darauf, ausgeführt zu werden |
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 | Alle Anweisungen werden ausgeführt |
Seifenblase
Wenn ein "Schluckauf" (Unterbrechung) bei der Ausführung auftritt, entsteht in der Pipeline eine "Blase", in der nichts Nützliches geschieht. In Zyklus 2 wird das Holen der violetten Anweisung verzögert, und die Dekodierungsphase in Zyklus 3 enthält nun eine "Blase". Alles hinter der violetten Anweisung wird ebenfalls verzögert, aber alles vor der violetten Anweisung fährt mit der Ausführung fort.
Verglichen mit der obigen Ausführung ergibt die Blase eindeutig eine Gesamtausführungszeit von 8 statt 7 Uhr-Ticks.
Blasen sind wie Stände (Verzögerungen), in denen beim Holen, Entschlüsseln, Ausführen und Zurückschreiben nichts Nützliches geschieht. Es ist wie ein NOP-Code (kurz für No OPeration).
Beispiel 1
Eine typische Anweisung zum Addieren von zwei Zahlen könnte ADD A, B, C sein, die die in den Speicherplätzen A und B gefundenen Werte addiert und dann das Ergebnis in Speicherplatz C ablegt. In einem Pipeline-Prozessor würde der Pipeline-Controller dies in eine Reihe von Aufgaben aufteilen, die ähnlich sind:
Die Stellen 'R1' und 'R2' sind Register in der CPU. Die in den mit 'A' und 'B' bezeichneten Speicherstellen gespeicherten Werte werden in diese Register geladen (kopiert), dann addiert und das Ergebnis in einer mit 'C' bezeichneten Speicherstelle gespeichert.
In diesem Beispiel besteht die Pipeline aus drei Stufen: Laden, Ausführen und Speichern. Jeder der Schritte wird als Pipeline-Stufen bezeichnet.
Bei einem Prozessor ohne Pipeline kann immer nur eine Stufe gleichzeitig arbeiten, so dass die gesamte Anweisung abgeschlossen sein muss, bevor die nächste Anweisung beginnen kann. Bei einem Prozessor mit Pipeline-Prozessor können alle Stufen gleichzeitig an verschiedenen Befehlen arbeiten. Wenn sich dieser Befehl also in der Ausführungsphase befindet, befindet sich ein zweiter Befehl in der Dekodierungsphase und ein dritter Befehl in der Abrufphase.
Beispiel 2
Um das Konzept besser zu verstehen, können wir uns eine theoretische 3-stufige Pipeline ansehen:
| Bühne | Beschreibung |
| laden | Befehl aus dem Speicher lesen |
| Ausführen | Befehl ausführen |
| Laden | Ergebnis in Speicher und/oder Registern speichern |
und eine Pseudocode-Assembly-Liste, die ausgeführt werden soll:
So würde es ausgeführt werden:
| Uhr 1 | ||
| laden | Ausführen | Laden |
| LADEN |
|
|
Der Befehl LOAD wird aus dem Speicher geholt.
| Uhr 2 | ||
| laden | Ausführen | Laden |
| MOVE | LADEN |
|
Der Befehl LOAD wird ausgeführt, während der Befehl MOVE aus dem Speicher geholt wird.
| Uhr 3 | ||
| laden | Ausführen | Laden |
| HINZUFÜGEN | MOVE | LADEN |
Der Befehl LOAD befindet sich in der Stufe Store, wo sein Ergebnis (die Zahl 40) im Register A gespeichert wird. In der Zwischenzeit wird der Befehl MOVE ausgeführt. Da sie den Inhalt von A nach B verschieben muss, muss sie auf das Ende der LOAD-Anweisung warten.
| Uhr 4 | ||
| laden | Ausführen | Laden |
| SPEICHERN | HINZUFÜGEN | MOVE |
Der STORE-Befehl wird geladen, während der MOVE-Befehl beendet wird und der ADD-Befehl berechnet wird.
Und so weiter. Beachten Sie, dass eine Anweisung manchmal vom Ergebnis einer anderen Anweisung abhängt (wie unser MOVE-Beispiel). Wenn mehr als eine Anweisung eine bestimmte Stelle für einen Operanden referenziert, entweder lesend (als Eingabe) oder schreibend (als Ausgabe), kann die Ausführung dieser Anweisungen in einer anderen Reihenfolge als der ursprünglichen Programmreihenfolge zu der (oben erwähnten) Gefahrensituation führen.


Verwandte Seiten
- Pipeline (Berechnung)
- Parallele Datenverarbeitung
- Parallelität auf Anweisungsebene
Fragen und Antworten
F: Was ist Instruktions-Pipelining?
A: Befehlspipelining ist eine Technik, die beim Design moderner Mikroprozessoren, Mikrocontroller und CPUs eingesetzt wird, um den Befehlsdurchsatz zu erhöhen, indem die Verarbeitung eines CPU-Befehls in eine Reihe unabhängiger Schritte mit Speicherung am Ende jedes Schritts unterteilt wird.
F: Wie funktioniert das Pipelining?
A: Pipelining funktioniert, indem die Logik in kleinere Teile zerlegt und Flip-Flops zwischen die Teile der Logik eingefügt werden. Dadurch wird die Zeit verkürzt, die die Logik benötigt, um Werte zu dekodieren, bis sie in Abhängigkeit von diesen Werten gültige Ausgaben erzeugt. Dies ermöglicht schnellere Taktperioden.
F: Was sind einige Beispiele für Pipelines?
A: Ein Beispiel für eine Pipeline ist die RISC-Pipeline, die in fünf Stufen mit einer Reihe von Flip-Flops zwischen den einzelnen Stufen unterteilt ist.
F: Wie erhöht Pipelining den Befehlsdurchsatz?
A: Pipelining erhöht den Befehlsdurchsatz, da die CPU-Module parallel arbeiten können, was die Leerlaufzeit während eines Befehlszyklus verringert und die Gesamtverarbeitungszeit erhöht.
F: Ist jede Pipeline vollständig mit Pipelines ausgestattet?
A: Nein, nicht jede Pipeline ist vollständig mit Pipelines ausgestattet. Einige Pipelines haben Wartezyklen, die den Fortschritt in der Pipeline verzögern.
Verwandte Artikel
Autor
AlegsaOnline.com Instruktions-Pipelining bei Prozessoren: Prinzip, Aufbau und Bedeutung Leandro Alegsa
URL: https://de.alegsaonline.com/art/47500